

This work represents the single-sensor algorithm development and validation in the test sites in Norway and Romania for the 2015 season. The validation was limited to comparison with air temperature as this was what was available for the 2015 season, but will be extended with comparison with in-situ snow liquid water measurements when these become available for the 2016 season.
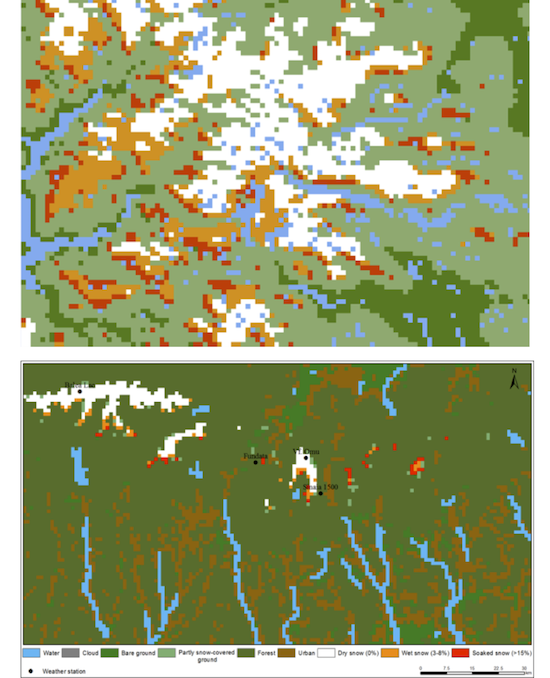
Optical snow wetness based on MODIS from 15 May 2015 acquired at 11:35 UTC for Norway and from 14 February 2015 acquired at 09:25 UTC for Romania
The multi-sensor/multi-temporal wet snow (MWS) algorithm have been developed by fusing optical and SAR data to map the wet snow area. Multi-temporal observations of wet snow with optical and SAR are fused in a novel model simulating states of surface properties to generate reliable wet snow maps. The algorithm is based on NR’s experience of combining data from multiple sensors using 4Hidden Markov Model (HMM) approaches. The snow map includes the thematic classes dry snow, moist snow, wet snow, very wet snow and soaked snow, in addition to partial snow cover, bare ground and clouds.
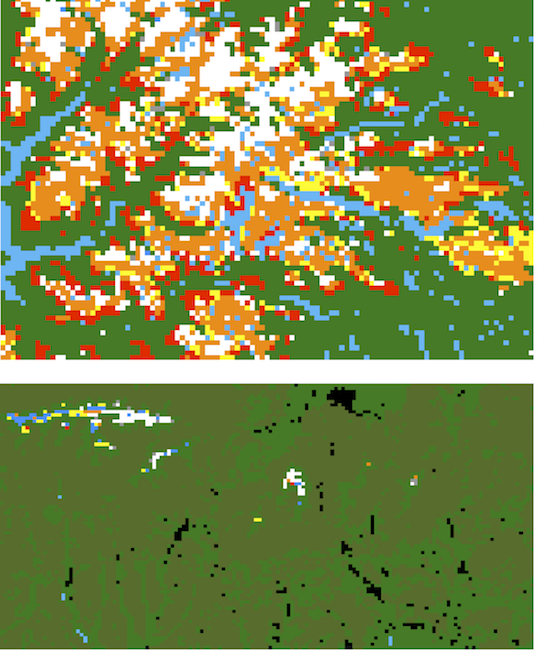
Multi-sensor snow wetness map from Jutunheimen, Norway, 21 April 2015 and Romania, 23 April 2015.
The validation analysis of the retrieval results for snow wetness from the novel multi-sensor/multi-temporal approached seems very promising, delivering retrieval results on a daily basis as categorical degrees of snow wetness independent of cloud cover. The approach is, however, mainly data driven so lack of observations necessarily also gives lack of quality. But when both Sentinel-1A and -1B become available (in the autumn 2016 according to ESA’s schedule), the observations become rather dense as Sentinel-3 also will give daily optical observations (but limited by cloud cover).
During this phase, was designed the methodology for estimating the snow water equivalent, by data fusion approach, using the distributed model NOAH simulations, ground observations and satellite products. Within the methodology, the different type of data and information are analyzed and compared, using a series of automatic cross-validation algorithms, and then the snow water equivalent is estimated in grid format, at spatial resolution of 1 km, by multiple successive steps of interpolations and adjustments, depending on the degree of uncertainty associated with different type of data.